FLO.ROBOT
FLOramiata ROBOTica
Innovazione tecnologica, miglioramento del lavoro e sostenibilità aziendale
PROTOTIPO Robot per la preparazione della talea
FLOROBOT CONTENUTI E OBIETTIVI DEL PROGETTO
PROGETTO FLOROBOT
Il progetto Florobot nasce nel 2017 con l’obiettivo di automatizzare l’operazione colturale di approntamento delle talee della pianta di Scindapsus. Lo Scindapsus aureus, o Pothos è una specie vegetale tropicale rampicante sempreverde, largamente coltivata in floricoltura, come pianta ornamentale da interno. La funzione decorativa è data dalle sue foglie variegate che si dipartono dai lunghi rami. Lo sviluppo dei rami può raggiungere lunghezze notevoli, che, nel suo habitat naturale possono raggiungere i 6-8 m. Le foglie, che hanno una forma ovata e acuminata nella parte distale, in natura possono sviluppare lamine di oltre 50 centimetri di diametro, mentre nella coltivazione ornamentale raggiungono 5 – 20 cm. Il colore delle foglie nella varietà aureus è verde screziato di giallo che comunque, nella coltivazione casalinga, complice talvolta un’esposizione poco luminosa, può trasformarsi in verde uniforme.
Nella industria florovivaistica le piante di Scindapsus vengono coltivate in vasi appesi (basket), il cui effetto decorativo è ottenuto dalla vegetazione cadente, oppure in vasi dotati di pali tutori, a cui le piante aderiscono costituendo una lussureggiante colonna di vegetazione. Nella coltivazione floricola, l’effetto ornamentale delle piante, siano esse coltivate in basket o in vasi con tutore, è ottenuto facendo crescere assieme numerose singole piante i cui rami e foglie vanno a costituire un agglomerato decorativo. Questa tecnica di coltivazione richiede l’utilizzo di numero elevato di talee. In genere per coltivare un vaso del diametro di 20 centimetri è necessario piantare dalle 12 alle 21 talee. Nel caso dell’azienda Floramiata, che annualmente produce circa 400.000 piante, si stima sia necessario preparare circa 5,5 milioni di talee.
Tenuto conto della onerosità dell’operazione di preparazione delle talee, si è ritenuto utile impostare una sperimentazione per trovare una soluzione industriale innovativa che permettesse la meccanizzazione della operazione di taglio con l’utilizzo di un Robot, ossia di una macchina programmabile capace di svolgere, in maniera autonoma, tale lavoro.
Il progetto, per la realizzazione di un prototipo del braccio meccanico antropomorfo movimentato in maniera autonoma è stato quindi inserito nell’ambito del progetto FLOR.TE.MA.SOTTOMISURA 16.2 PSR 2014-2020 cofinanziato dalla Regione Toscana. Il progetto per la sua realizzazione ha coinvolto tre soggetti aventi specifiche competenze: parte industriale vivaistica è stata svolta da Floramiata Soc Agricola, la parte informatica è stata affidata DIEF e il riconoscimento visivo è stato realizzato dalla società PC System s.r.l.
Il primo apporto operativo di Floramiata, come da progetto, ha riguardato da un lato lo studio e la descrizione puntuale delle specifiche tecniche riguardanti le caratteristiche del processo di produzione e delle caratteristiche dimensionali delle talee, (lembo fogliare, nodo, picciolo, radici). Dall’altro, il coordinamento dei partner di progetto.
Condivisi i termini generali del progetto, in collaborazione con DIEF si è proceduto alla scelta e acquisto del braccio robotico. Lo svolgimento di questa fase è risultato molto lungo e complesso, sia per l’ampia gamma di prodotti sul mercato, sia per le numerose caratteristiche tecnologiche da vagliare. Una ulteriore difficoltà che ha allungato i tempi di scelta è dovuta al verificarsi della Pandemia di COVID 19, che di fatto, per circa due anni ha interrotto le ricerche e, nella fase successiva all’acquisto, ha messo a repentaglio la consegna della macchina a causa della grave crisi della disponibilità mondiale dei componenti.
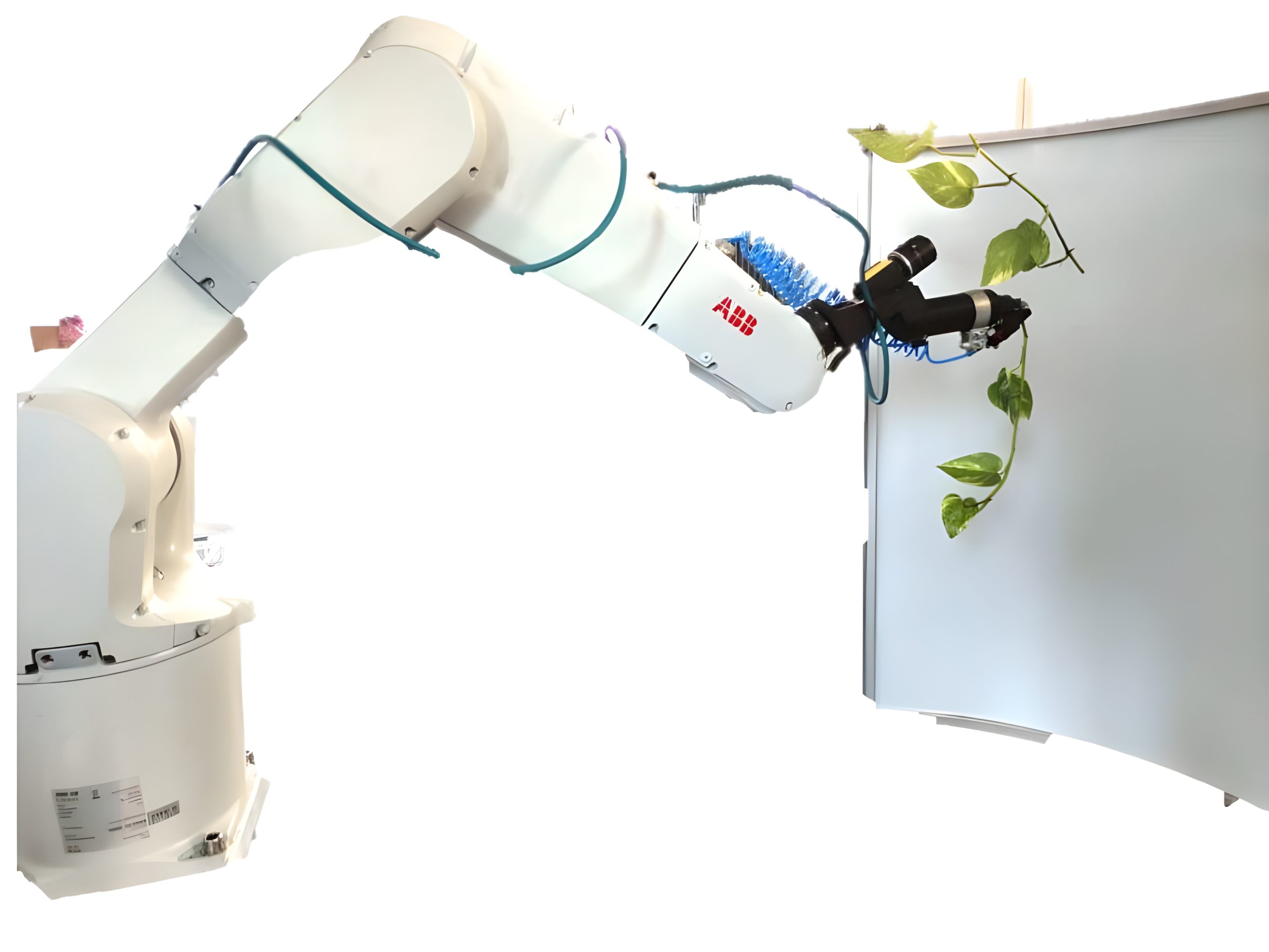
Nel 2022 si è comunque acquisito il braccio robotico ABB IRB 1200-5 /0.9 che soddisfa in maniera completa le necessità del progetto. Contemporaneamente all’acquisto del robot è stato acquisito anche l’apparato di taglio e presa, costituito da un doppio utensile pneumatico.
Nel corso della realizzazione è stato necessario implementare nel sistema, un dispositivo di retroilluminazione necessario per illuminare in maniera omogenea tutte le parti del tralcio. Il dispositivo, non precedentemente preventivato e stato appositamente progettato e realizzato ed è stato inserito nel sistema.
Lo sviluppo del software del progetto è stato realizzato dall’azienda di informatica PC. System in collaborazione coi il suo partner R4P, in stretta collaborazione con DIEF. Il controllo delle attività della macchina è stato ottenuto con la ideazione di un software comprendente molteplici algoritmi, rapportabili principalmente a due ambiti di operatività: gli algoritmi di riconoscimento visivo della talea e dei punti di taglio e di quelli necessari alla di movimentazione del braccio robotico.
Le prove di funzionalità del software, hanno comportato l’effettuazione di numerosissimi di test sul materiale vegetale dai cui sono emerse, e, sono state superate, molte situazioni di complessità dovute all’enorme variabilità di sviluppo dei diversi organi della pianta.
Questa, infatti, presenta caratteristiche dimensionali e di forma delle parti vegetative assai variabili: fusto erbaceo molto flessibile, diametro della lamina fogliare da 5 cm a oltre 10 cm, piccioli diritti o curvi, a volte anche attorcigliati su sé stessi e nodi di diametro variabile spesso dotati di radici aeree.
In molti casi questa variabilità impedisce al software del robot l’individuazione dei punti di taglio o l’accesso al punto di recisione. Per superarli, oltre ad a trovare algoritmi di riconoscimento sempre più raffinati, si è deciso che il software, dopo una valutazione di tutte le possibili soluzioni, effettui la scelta di saltare il taglio di quel tratto di ramo e di passare al taglio immediatamente superiore.
Azione, che in realtà, è adottata anche processo manuale di produzione, dove, nel momento in cui vi è un dubbio sulla qualità o conformazione della talea, il tratto di ramo coinvolto viene scartato. Lo scarto, non compromette l’economicità della lavorazione, in quanto, nella produzione florovivaistica, il materiale vegetale da cui si traggono le talee, è sovrabbondante rispetto alle necessità. Il materiale vegetale è infatti rappresentato da rami di Scindapsus derivati dalla potatura delle piante coltivate in vaso, operazione colturale comunque necessaria per migliorare la ramificazione e l’infoltimento.
Il robot, nella fase di test operativi, è stato dotato di una telecamera posta a bordo del braccio robotico, per consentire alla macchina l’acquisizione di più immagini riprese da diversi punti dello spazio. Tale scelta tecnica, ha permesso una visione più precisa dello stato del tralcio. Gli algoritmi ideati per il riconoscimento visivo consentono comunque la scalabilità del sistema, dalla telecamera mobile posta sul braccio, a due telecamere fisse. Quest’ultimo tipo di posizionamento consente una notevole riduzione del tempo di realizzazione del ciclo di lavoro del robot, venendo meno i tempi di posizionamento nei tre punti spaziali di ripresa, che precedono ciascun taglio.
L’attuale posizionamento della telecamera a bordo del braccio del prototipo consente di poter testare la e migliorare le funzionalità della macchina non solo nel caso specifico dello scindapsus ma anche per taglio di talee di altre specie, quali rosmarino, rose, bouganville, gelsomini, edere ecc. con una minima rifunzionalizzazione degli algoritmi.
Il software di riconoscimento visivo attualmente riesce a individuare con ottima precisione i punti di taglio delle talee di Scindapsus effettuandone il raccorciamento la presa e il distacco. La scalabilità industriale del prototipo del robot, ossia la sua applicabilità nell’azienda florovivaistica necessita dell’implementazione di strutture di sostegno, di sicurezza e della realizzazione dell’apparato di trasporto dei tralci e, nel caso si voglia fare l’impianto delle talee, dell’apparato di trasporto dei vasi.
Le attuali funzionalità raggiunte del prototipo del robot costituiscono il completo raggiungimento degli obiettivi previsti dal progetto a cui si affianca la possibilità di utilizzare la macchina per la realizzazione di altre attività colturali di taleaggio di altre specie ed anche per l’effettuazione di attività di trapianto.
APPROFONDIMENTI:
ALLEGATI PDF:
PROGETTO FLOROBOT mis.16.2 all.
ARTICOLO – Preliminary Design and optimisation_Massimo Delogu_UNIFI
